Work Blog
Notebook
Travel
Recipes
Misc
Code
Websites
Bookmarks
Work Blog
Reimagining Today’s Electronics Handbooks
Incredible Feats of Productivity
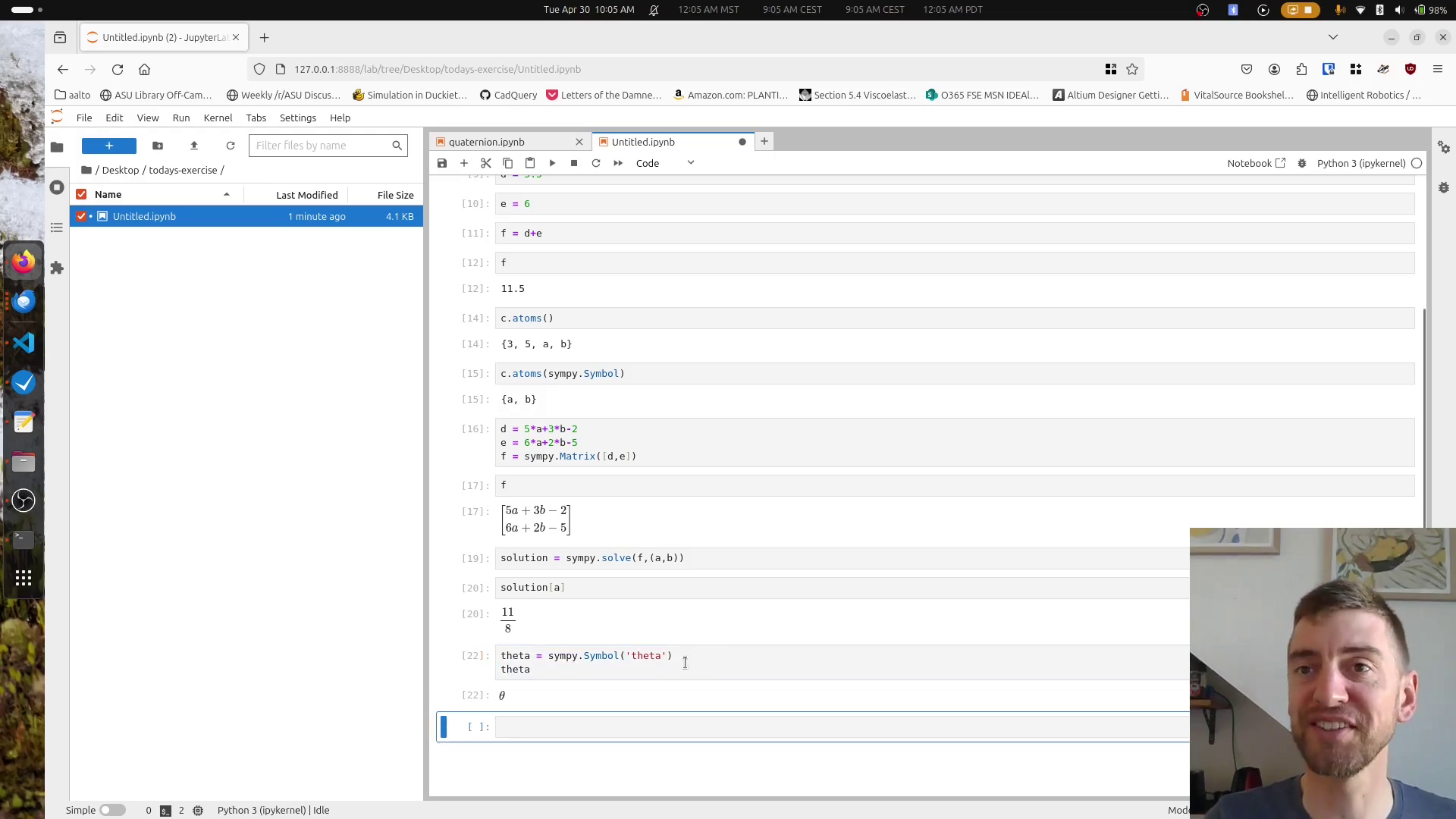
A Brief Intro to Symbolic Expressions in Python
Techniques for solving four-bar linkage equations
Inverse Dynamics in Mujoco
Python and Jupyter in Containers
Using ROS2 over VPNs in the Classroom
The purpose of this tutorial is to provide a way to provide access to ROS2 style data collection …
Ros2
Ubuntu
Linux
Tailscale
Rpi
Docker
Tailscale
VPN
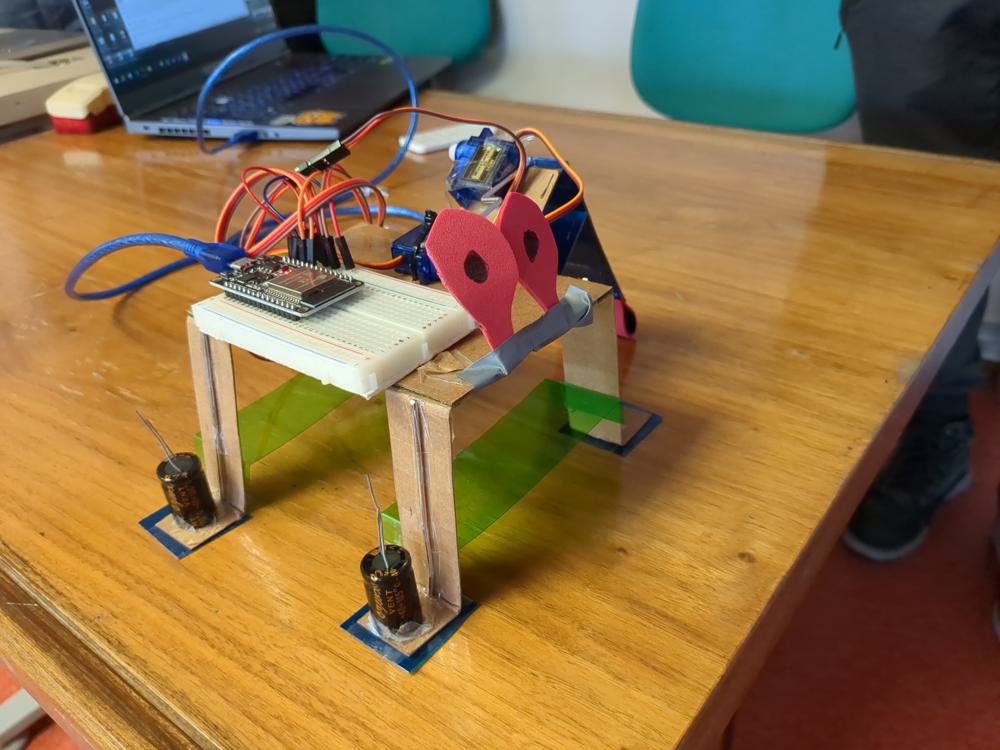
Wrapping up “Flexible Robotics”
Micro Servo Data Collection, Parameter Identification, and Modeling: Parts 5 and 6
Micro Servo Data Collection, Parameter Identification, and Modeling: Parts 1-4
««
«
1
2
3
»
»»
Tags
Ai
Anaconda
Android
Answer
Ardour
Arduino
Asus
Atom
Audio
Backup
Bash
Ble
Bno055
Bno085
Cad
Camera
Choco
Ci cd
Cmake
Cmd
Cnc
Command line
Compression
Computer
Conda
Cplusplus
Cyclonedds
Dconf
Ddns
DHCP
Django
DNS
Docker
Dotnet
Dvd
Dynamixel
E reader
Embedded systems
Encryption
Epub
Esp32
Esp32cam
Exif
Ext4
Fem
Ffmpeg
File transfer
Firefox
Firewall
Flatpak
Fonts
Fun
Gif
Git
Github
Github actions
Gnome
Gpg
Gpio
Grapheneos
Grep
Gui
Heif
Home assistant
Hugo
I2c
Idealab
Image generation
Images
Imu
Iot
Javascript
Jupyter
Keys
Kobo
Korg
Laser
Latex
Linux
Logitech
Luks
Maintenance
Mariadb
Markdown
Mechatronics
Metadata
Microcontroller
Microdot
Micropython
Mkdocs
Mqtt
Mujoco
Nautilus
Netplan
Networking
Nextcloud
Nginx
Nixos
Node
Nodejs
Noip
Npm
Office
Opencm
Opencv
Openscad
Openvpn
Optitrack
Overleaf
Pandoc
Pdf
Photo
Photos
Pihole
Plotting
Podcasting
Ports
Presentations
Printing
Publishing
Pybullet
Pyqt
Python
Qt
Raspberry pi
Raspberrypi
Rclone
Rdp
Recovery
Restore
Robotics
Robotis
Ros
Ros2
Rosbridge
Rpi
Rsync
Samba
Sbcs
Scripting
Sd card
Security
Servo
Sh
Shapeoko
Simulation
Smart home
Smart plug
SNAP
Speech to text
SSH
Storage
Syncthing
Systemd
Tablet
Tailscale
Tasmota
Terminal
Termux
Text to speech
Textbook
Thorlabs
Tmux
Tools
Topics
Ubuntu
Unicast
Universal robots
Ur5
Video
Virtualbox
Vnc
VPN
Vscode
Webrepl
Websites
Wget
Windows
Wine
Xl320
Xpath
Youtube
Zoom
About Me
Know More
External